|
|
I would like to build an automated snowplow. To test out a few ideas,
I decided to build a cheap base and see what works as I envision, and
what does not.
I started with a quick survey of what I had handy. I came up with a Tamyia
tracked vehicle chassis kit, my BOE Bot from Parallax, and a sheet of
1/8" plywood. I figured that should be enough to get started on a
prototype. Parts 'stolen' from the BOE Bot could either be returned, or
if I decide to keep my prototype, replaced. Replacements are inexpensive
and Parallax will ship them to my house.
The Tamyia kit, while fun, is not the right product for a robot. The kit
I have has a kewl gearbox, but it turns both tracks on the same axle meaning
you can only choose forward or reverse. Tamyia makes two other gearboxes,
each with two independent motors, each moving a track independently of
the other. In the long run one of these gearboxes may be a good replacement
for a robot. In the really long run, this robot is just a quick test bed.
It's too small for my ultimate application anyway, so I worked with what
I had.
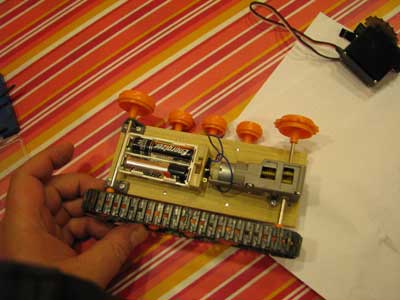
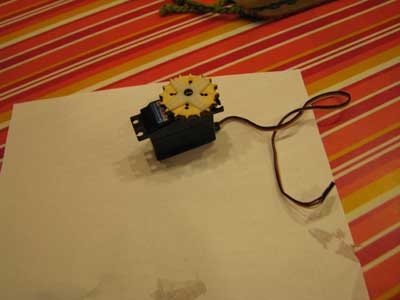
I started by replacing the stock motor and gearbox with a pair of hobby
servos that were modified for continuous rotation. Mine came from my BOE
Bot, but Parallax sells them separately. The Internet also has several
with good sites with directions describing how to modify model airplane
servos for continuous rotation.
To make it fit, and to have a way to securely mount the
servos, I cut a new wooden base, and some drive wheels to mount on the
servos.

|
|